NIS-AN Analogic Sensor (4-20ma,0-10v)

Contents
1 General information
1.1 Overview
- LoRa™ WAN 1.0.2 EU Class A & C
- Activation by Personalization (ABP)
- Over-The-Air Activation (OTAA)
- SIGFOX™ ready
- Fully certified on major LoraWan & Sigfox networks
- Easy to use and deploy
- 3.6V / 2200mAh Primary battery Li-SOCl2 embedded
- Magnetic switch and LED to ease the installation
- RoHS conform / Pre-Certified ETSI EN 300-220 / RED compliance under certification
1.1.1 RF Performance
- TX Power 14 dBm (25 mW)
- RX Sensitivity -137 dBm
- Approx. 10 km range
- Integrated PCB antenna
1.1.2 Environment
- Operating temperature -40°C to +85°C
- Storage temperature 30°C recommended (to limit battery self-discharge)
- Rel. humidity 0% to 95% (not condensing)
1.1.3 Options
- External antenna
- SDK for your SW development purposes
- 10-30V external power supply
- Compatible with the NEMEUS PicoGateway for private networks
1.2 Installation
By using the internal antenna, the position of the sensor is critical.
Install your product as high as possible, and prefer unobstructed area (concrete and metal are the worst materials).
If you cannot fulfill these conditions, it is still possible to use an optional external antenna.
2 Mechanics
- Dimensions 60 x 95 x 85mm (109mm including fixing brackets)
- 96mm spacing between brackets
- IP 65
- Solid ABS & PC material
3 AN Analogic sensor properties
This sensor board allows monitoring of 4-20mA or 0-10V signal from compatible probe
4 Wiring

4.1 Digital input
{{#lst:NIS-IO_Digital_Sensor|Input Electrical Characteristics}}
Label DIGITAL_IN
Label JP1
- jumper on 1-2
- Pull down configuration
- jumper on 2-3
- Pull up configuration
- no jumper
- floating input
4.2 Power output
Label 12V
- Software configurable low-current voltage source. Hardware configurable until 15V. Can be used to power sensors
| current sink @15V output | current sink @3.6V input | Power out (mW) | Power in (mW) | Efficiency (%) |
| 11mA | 69mA | 165 | 248,4 | 66 |
| 12.8mA | 79mA | 192 | 284,4 | 68 |
| 15.4mA | 95mA | 231 | 342 | 68 |
| 19.2mA | 118.9mA | 288 | 428,04 | 67 |
| 25.5mA | 143.9mA | 382,5 | 518,04 | 74 |
| 38.0mA | 215.7mA | 570 | 776,52 | 73 |
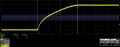
Vout rising time for 11mA @15V
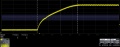
Vout rising time for 12.8mA @15V
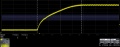
Vout rising time for 15.4mA @15V
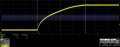
Vout rising time for 19.2mA @15V
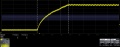
Vout rising time for 25.5mA @15V
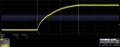
Vout rising time for 38mA @15V
4.3 Ground
Label GND
4.4 Analog input
Label ANALOG_IN
- 12 bit ADC
- 50Ω input impedance for 4-20mA configuration
- 11kΩ input impedance for 0-10V configuration
4.4.1 4-20mA mode
High linearity of measurements.
| uA measured | uA command |
| 54 | 60 |
| 199 | 204 |
| 487 | 498 |
| 996 | 1002 |
| 1490 | 1501 |
| 1989 | 1992 |
| 2337 | 2341 |
| 2572 | 2583 |
| 2962 | 2972 |
| 3683 | 3691 |
| 4045 | 4051 |
| 4442 | 4450 |
| 5042 | 5051 |
| 5533 | 5534 |
| 6018 | 6022 |
| 6532 | 6541 |
| 7005 | 7012 |
| 7500 | 7508 |
| 8035 | 8041 |
| 8511 | 8516 |
| 9016 | 9024 |
| 9522 | 9529 |
| 10032 | 10044 |
| 10537 | 10546 |
| 11045 | 11062 |
| 11543 | 11549 |
| 12010 | 12013 |
| 12507 | 12524 |
| 13020 | 13032 |
| 13553 | 13565 |
| 14053 | 14063 |
| 14527 | 14534 |
| 15063 | 15068 |
| 15524 | 15530 |
| 16035 | 16042 |
| 16512 | 16518 |
| 17020 | 17034 |
| 17521 | 17535 |
| 18059 | 18067 |
| 18511 | 18526 |
| 19023 | 19038 |
| 19511 | 19533 |
| 20057 | 20075 |
| 20546 | 20563 |

4.4.2 0-10V Mode
| mV measured | mV command |
| 0 | 0 |
| 503 | 496 |
| 1003 | 993 |
| 1502 | 1493 |
| 2002 | 1988 |
| 2502 | 2487 |
| 3002 | 2985 |
| 3501 | 3480 |
| 4002 | 3978 |
| 4501 | 4477 |
| 5001 | 4972 |
| 5501 | 5470 |
| 6000 | 5970 |
| 6500 | 6467 |
| 7000 | 6963 |
| 7499 | 7462 |
| 7999 | 7955 |
| 8499 | 8453 |
| 8999 | 8952 |
| 9499 | 9447 |
| 9998 | 9945 |
| 10498 | 10444 |

4.5 Digital output
{{#lst:NIS-IO_Digital_Sensor|Output Electrical Characteristics}}
Label DIGITAL_OUT
5 Magnetic Switch Protocol description
5.1 Generic Magnetic Switch Protocol description
Nemeus sensors embed a magnetic switch and a green LED to implement a simple man to machine interface.
The LED blinks every second while the magnet is present.
If the magnet is present during 20 seconds, it triggers an hardware reset.
The 20 seconds range has been cut in 10 timeslots of 2 seconds, the actions performed for each timeslot (TSX) are the following:
- 0s <= TS1 < 2s: read current state, number of led blinks indicates the following states:
- 1 blink: standby mode
- 2 blinks: joint with LoRaWAN network only (Sigfox is disabled)
- 3 blinks: Sigfox enabled only (no LoRaWAN)
- 4 blinks: joint with LoRaWAN network and Sigfox is enabled
- 6 blinks: joining LoRaWAN network (no Sigfox)
- 8 blinks: joining LoRaWAN network and Sigfox is enabled
- 9 blinks: measures are ongoing but transmission is forbidden
- 2s <= TS2 < 4s: switch to normal mode (if not already in normal mode) or force one measure and one Tx (if already in normal mode)
- 4s <= TS3 < 6s: switch to standby mode, it is the default mode when the device is stored and not yet activated
- 6s <= TS4 < 8s: perform a warm reset, the device resets and goes back to its previous mode
- 8s <= TS5 < 10s: forbid transmission, the device still performs measures but never transmit them
- 10s <= TS6 < 12s: switch to test mode, the device suspends the measures and forbid transmission, then it switches to continuous Rx on a specific channel and wait for test mode commands, if nothing is received after 60 seconds then it goes back to its previous mode. During test mode the led blinks and the magnetic switch is disabled.
- 12s <= TS7 < 14s: no action
- 14s <= TS8 < 16s: no action
- 16s <= TS9 < 18s: no action
- 18s <= TS10 < 20s: no action
- 20s <= TSHw: hardware reset
When the magnet is removed, the LED blinks fast X times, X identifies the timeslot (1 to 10).
5.1.1 Standby mode
It is the default mode set in factory, the device does nothing and consumes few µA (consumption depends on the sensor type).
5.1.2 Normal mode
The first time the device switches to normal mode, it performs the join procedure with the LoRaWAN network.
Then it performs a first measure and transmits it to the network whatever the number of measures required to trigger a transmission.
Finally it performs measures according to the configured period and transmits them according to configured number of measures required to trigger a transmission.
5.1.3 Forbid transmission mode
In this mode the device performs measures according to the configured period but never transmits them to the LoRaWAN network. This mode is mainly used in R&D phase to tune the measure algorithm, it shouldn’t be used when the device is deployed.
5.1.4 Test mode
This mode is used to modify the device configuration over the air using a Nemeus tool, this tool must be in the vicinity of the device. A security key is used to authenticate the Nemeus tool and the device.
5.1.5 Warm reset
The warm reset restarts the device and put it in its previous state. For example, if the device was joining the network, it restarts its join procedure. If it was already joint and performing periodic measures then it transmits the first measure and restarts the periodic measures.
6 Radio frames description
6.1 Generic Application Protocol description
6.1.1 Nemeus uplink protocol
Nemeus uplink protocol is used to send sensor data to application server. The payload contains the following fields:
- <mask>: At least 1 byte containing a bit field identifying the fields included in the frame. The meaning of the mask is specific to the couple device/port. Thus, the application server knows the mask meaning according to the data profile linked to the couple device/port. The most significant bit of the <mask> is used to extend the mask on the next byte: 1 means not extended (mask is on 7 bits) and 0 means extended (mask is on 14 bits). When extended, the following byte can also be extended according to its most significant bit. When the <mask> field is on several bytes, it is encoded in little endian (LSB first). For example, a <mask> coded on 2 bytes like “00100001 11001100” will be on 14 bits: “10011000100001”. Each bit indicates the presence/absence of a field. When a field is present, it appears in the frame according to the bit position (beginning with the least significant bit).
- <field1>: first data field identified by the data profile linked to the couple device/port.
- …
- <fieldN>: last data field identified by the data profile linked to the couple device/port.
6.1.2 Nemeus downlink protocol
Nemeus downlink protocol is used to exchange commands between application servers (located in network infra or in configuration PC) and sensor embedded applications.
Application port is used to address an application (application ports are bound with LoRaWAN ports). Thus, the protocol consists in a binary payload exchanged on a port. The payload contains the following fields:
- <cmd>: 1 byte identifying an applicative command/response.
- <mask>: At least 1 byte containing a bit field identifying the fields included in the frame. See uplink protocol above for description.
- <field1>: first data field identified by the data profile linked to the couple device/port.
- …
- <fieldN>: last data field identified by the data profile linked to the couple device/port.
Most significant bit of <cmd> field specifies if response is expected by the server or not (commands of type “set” doesn’t require any answer, especially when radio interface is used).
<cmd> values are defined for each application port (e.g. <cmd> value 0x01 has a different meaning on port 1 than on port 2).
A response reuse the same <cmd> as the received command, except the most significant bit which is forced to 0 (because a response doesn’t expect any response). The response <mask> indicates which fields of the command have been actually processed.
When a parameter type size is more than one byte, it is encoded in little endian (LSB first).
Downlink command may be received either from network application server or from PC configuration tool through AT command.
The generic application AT command is used:
AT+GA=DIND,<port>,<hexpayload>.
6.2 Uplink data Frame format
The uplink payload contains multiple fields:
<mask>: bit field on 1 byte indicating the presence of other fields. Bit 7 is always to 1 because the mask is never extended on next byte.
bit 0 : indicates the presence of <nb_meas> field.
bit 1 : indicates the presence of <analog_meas> field.
bit 2 : indicates the presence of <voltage> field.
bit 3 : indicates the presence of <internal_temp> field.
bit 4 : is reserved.
bit 5 : indicates the presence of <cause> field.
When bit 0 is not set, it means that other fields are present only once (nb_meas = 1).
if (mask.bit0 == 1) :
<nb_meas>: 1 byte containing the number of measurements which follows.
if (mask.bit1 == 1) :
<analog_meas>: 2*<nb_meas> bytes containing the analog measure values in mV or µA. Each measure value is a signed integer on 16 bits in big endian [-32768..+32767].
if (mask.bit2 == 1) :
<voltage>: 2*<nb_meas> bytes containing the voltage values measured by the sensor in millivolts. Each voltage value is an unsigned integer on 16 bits in big endian.
if (mask.bit3 == 1)
<internal_temp>: 1*<nb_meas> bytes containing the internal temperature values (using MCU internal sensor). Each temperature value is a signed integer on 8 bits in big endian in °C [-128..+127].
if (mask.bit5 == 1) :
<cause>: 1 byte containing the cause of the uplink frame. It is a bit field:
Bit 0 indicates a periodic measure
Bit 1 indicates the high threshold exceeding (analog_meas > high threshold)
Bit 2 indicates the high hysteresis exceeding (analog_meas < high threshold - high hysteresis)
Bit 3 indicates the low threshold exceeding (analog_meas < low threshold)
Bit 4 indicates the low hysteresis exceeding (analog_meas > low threshold + low hysteresis)
Bit 5 indicates the measure has been forced manually (with magnetic switch)
Usually <cause> field is absent when threshold detections are disabled (periodic measures only)
Thus the uplink frame format is <mask><nb_meas><analog_meas1>...<analog_measN><voltage1>...<voltageN><internal_temp1>...<internal_tempN><cause>
Default <mask> value is 0x8B which means that the default frame is <mask><nb_meas><analog_meas1>...<analog_measN><internal_temp1>...<internal_tempN>
Some examples (in hexadecimal):
“820239”: the frame indicates one analog measurement of 5689 mV or µA. “8302128E2533”: the frame indicates two analog measurements of 4750mV or µA and 9523 mV or µA.
6.3 Downlink Frame format
The sensor configuration contains the following fields:
<up_frame_mask>: the mask identifying the different fields present in uplink frames (possible values are described in “Uplink data Frame format” section) <nb_meas_for_tx>: the number of measures required to trigger a transmission (possible values are [1..8] <meas_period>: the period of the measures in <perdiod_unit> seconds(possible values are [600..65535] <period_unit>: the unit of <meas_period> in seconds, the resulting period is <meas_perios>*<period_unit> seconds <mode>: bit field enabling/disabling the measures (threshold detections and periodic measures) <subperiod>: subdivision of period for threshold detection, actual measurement period is (<meas_period>*<period_unit>)/<subperiod> seconds <high_threshold>: value of high threshold <high_hysteresis>: value of high hysteresis <low_threshold>: value of low threshold <low_hysteresis>: value of low hysteresis <pwr_on_duration>: value in ms to wait between sensor power-on and measure reading
It is possible to change the sensor configuration using the Nemeus downlink protocol. The downlink frame must be sent on the MS008 LoRaWAN port (11).
The downlink frame has the following format:
<cmd>: 1 byte containing WRITE_CFG_CMD=0x02
<mask>: bit field on 1 byte indicating the presence of other fields. Most significant bit (bit7) is always to 1 because the mask is never extended on next byte.
Bit0 indicates the presence of <up_frame_mask> field
Bit1 indicates the presence of <nb_meas_for_tx> field
Bit2 indicates the presence of <meas_period> and <period_unit> fields
Bit3 indicates the presence of <mode> and <subperiod> fields
Bit4 indicates the presence of <high_threshold> and <high_hysteresis> fields
Bit5 indicates the presence of <low_threshold> and <low_hysteresis> fields
Bit6 indicates the presence of <pwr_on_duration> field
If (mask.bit0 == 1):
<up_frame_mask>: 1 byte containing the uplink frame mask
If (mask.bit1 == 1):
<nb_meas_for_tx>: 1 byte containing the number of measurements required to trigger a transmission
If (mask.bit2 == 1):
<meas_period>: 2 bytes in little endian (LSB first) containing the period of measurements in <period_unit> seconds <period_unit>: 1 byte containing the unit of <meas_period> in seconds (default value is 1 second)
If (mask.bit3 == 1):
<mode>: 1 byte encoded as follows:
bit0: enable(1)/disable(0) high threshold detection
bit1: enable(1)/disable(0) high hysteresis detection (when leaving high threshold state)
bit2: enable(1)/disable(0) low threshold detection
bit3: enable(1)/disable(0) low hysteresis detection (when leaving low threshold state)
bit4: enable(1)/disable(0) periodic measurements
bit5: reserved
bit6: 0-10V(1)/4-20mA(0)
bit7: reserved
<subperiod>: 2 bytes in little endian containing the period subdivision
If (mask.bit4 == 1):
<high_threshold>: signed integer on 2 bytes in little endian containing the high threshold in mV [0..+9999] or µA [+4000..+19999] <high_hysteresis>: unsigned integer on 1 byte containing the hysteresis when leaving high threshold state in 100 mV or 100 µA [0..255]
If (mask.bit5 == 1):
<low_threshold>: signed integer on 2 bytes in little endian containing the low threshold in mV [+1..+10000] or µA [+4001..+20000] <low_hysteresis>: unsigned integer on 1 byte containing the hysteresis when leaving low threshold state in 100 mV or 100 µA [0..255]
If (mask.bit6 == 1):
<pwr_on_duration>: unsigned integer on 2 bytes containing the delay in ms [0..65535]
Thus the downlink frame format is <cmd><mask><up_frame_mask><nb_meas_for_tx><meas_period><period_unit><mode><subperiod><high_threshold><high_hysteresis><low_threshold> <low_hysteresis><pwr_on_duration>.
Some examples in hexadecimal:
“028182”: set the <up_frame_mask> to 0x82 => the next uplink frames will include the <analog_meas> field only “028E04605401100100”: set <nb_meas_for_tx> to 4, <meas_period> to 21600*<period_unit> seconds, <period_unit> to 1 second and enable periodic measurements only with subperiod to 1 => one measurement every 6 hours and one transmission every 4 measures (every day). Each uplink frame will include 4 measurements
6.4 Power consumption
Power consumption calculator based on the number of measurements and transmissions.